

 Om de vacuüm C van de loop te besturen heb ik al eens voorgesteld om de motor en de slipkoppeling van een afgedankte boormachine te gebruiken. De slipkoppeling moet voorkomen dat de vacuüm C niet beschadigd wordt als je aan het einde van het regelbereik van de capaciteit komt. Doordraaien betekent vastlopen van de C of losdraaien van de as.
Om de vacuüm C van de loop te besturen heb ik al eens voorgesteld om de motor en de slipkoppeling van een afgedankte boormachine te gebruiken. De slipkoppeling moet voorkomen dat de vacuüm C niet beschadigd wordt als je aan het einde van het regelbereik van de capaciteit komt. Doordraaien betekent vastlopen van de C of losdraaien van de as.
Helaas is de kracht die uitgeoefend moet worden op de as van de C bij het uitdraaien kleiner als bij het indraaien. De slipkoppeling en de spanning op de motor moet dus ingesteld worden op de grootste voorkomende kracht. Er moet voldoende koppel zijn om de as rond te draaien. Het zal duidelijk zijn dat het motortje tijdens het uitdraaien van de vacuüm C harder draait en de slipkoppeling (eigenlijk) te laat ingrijpt.
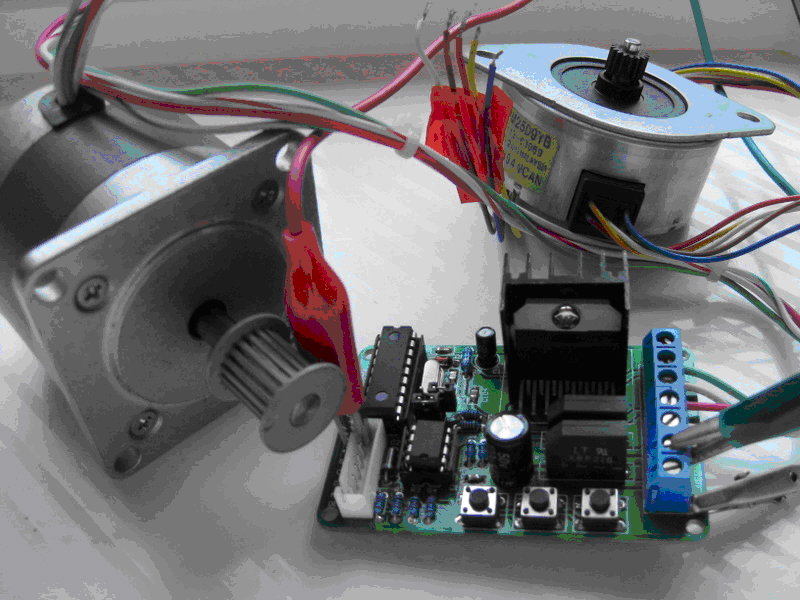
Een andere aandrijvingsmogelijkheid is d.m.v. een steppermotor. Het voordeel is dat de stapsnelheid erg goed te regelen is en het koppel bij elke snelheid constant blijft. Het nadeel is dat je voor de aansturing van een stappermotor een driverboardje moet bouwen.
Frans Bakelaar verkoopt voor een zeer aantrekkelijke prijs een compleet gebouwd controller boardje.
De prijs bedraagt slechts € 22,50 en de controller is te bestellen via http://home.kpn.nl/fbakelaar/
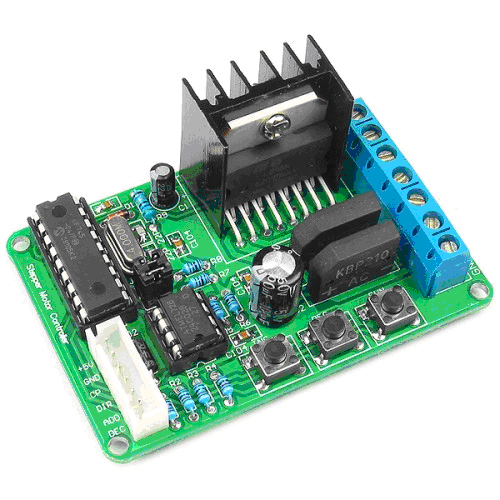
Nieuwe stappenmotor-controller en driver board met 2 controle-modi .
Je kunt de controle van de motor met pulsen en signalen extern of met behulp van de on-board knoppen bedienen.
Dit voor industriële ontworpen product is ideaal voor vele toepassingen. Perfect voor studenten experimenten, prototypes, of gewoon DIY projecten.
Specificaties:
- Te gebruiken motoren: 6 draden of 4 draden stepper motor (2-fase)
- Stroomsterkte: <2A
- Voltage (board): 5VDC
- Voltage (stappenmotor): 9-40VDC
- Motor toerental is instelbaar en kan worden opgeslagen in geheugen
Pulse en Signal Control Mode:
- Verwijder de jumper JP1
- Input Pulse: CP (je kunt dan de stap aanpassen voor snelheid van de motor)
- Directional signaal: DIR (hoogspanning = INC; lage spanning = DEC)
Button Control Mode:
- Montage jumper JP1
- Met jumper JP2 gemonteerd: INC = CW run, run december = CCW, FUN = Stop
- Met jumper JP2 verwijderd: INC = Versnel, DEC = Decellerate, FUN = Speed-geheugen
- (Als je jumper JP2 koppelt nadat snelheid is aangepast zal deze worden opgeslagen, zelfs wanneer de stroom is uitgeschakeld)
Nu nog een steppermotor scoren en de mechanische koppeling met de vacuüm C maken en een mooie afstandbesturing van de vacuüm C is een feit.
Succes,
Henny, PA3HK